.svg)
Shared Autonomy: EMG-Optimized Human Robot Collaboration
EMG-guided Human Robot Collaboration (HRC) enables automated optimization of worker posture and joint torque in industrial settings, reducing muscle effort and improving ergonomics during high-effort tasks.

Key Takeaways
- Human Robot Collaboration (HRC) is a robot that assists humans through an autonomous agent, used in workplaces requiring high-effort tasks to relieve muscle load on the worker.
- EMG is used in HRC research to determine and optimize the energy-saving effects of the system and to monitor ergonomic positions.
- This study found that through the controller method, optimized configurations were achieved that decreased muscle activity and effort during the task.
What is Human Robot Collaboration?
Human Robot Collaboration (HRC) is the facilitation of physical assistance between humans and robots through an autonomous agent. These systems are used in physically demanding work environments to relieve workload on the human co-worker. HRC systems have been increasingly used in industrial settings where the manufacturing process requires high-effort tasks.
EMG in HRC systems can be utilized within the controller to measure intended movement or to optimize the muscular contributions of the user for interaction with the robot, increasing its usability in high-effort environments.
Current Research
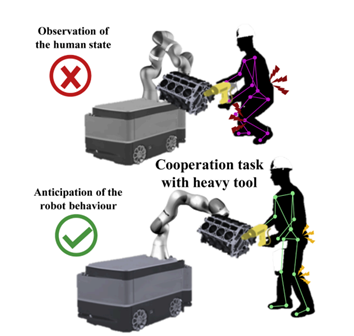
To address the limitations of current methods, Wansoo Kim and his team developed a novel HRC control method to allow for more ergonomic working configurations during dexterous tasks. The goal of this control method is to minimize the overall joint torque of the body while constraining manipulability, joint limits, or tangible obstacles. This is achieved by estimating and monitoring joint torque force using a dynamic state model in real-time through an Observation Layer, while an Anticipation Layer predicts the optimal ergonomic configuration that minimizes overloading joints.
How EMG Was Used
The method was tested based on the optimization of overloading joint torque, manipulability capacity, and muscle activity measured by EMG. The Delsys Trigno Wireless System was used to verify that the configuration provided by the HRC control method was reducing muscular effort. EMG sensors were placed on the Anterior Deltoid, Posterior Deltoid, Biceps Brachii and Triceps Brachii, and MVCs were performed to compare muscle effort during an optimized configuration.
What They Found
Once optimized configurations were achieved, muscle activity and effort decreased during the task as determined by the EMG data. The study also found a tradeoff between achieving lower body torque and manipulability capacity — however, through the control method, the HRC can configure towards a pose that allows for the most optimal arm manipulability and lowest joint force torque simultaneously.
This novel control method simplifies implementation in industrial settings and expands knowledge of HRC ergonomics, enabling safety procedures to be better tailored to prevent injuries for human co-workers.

Shall we chat about this topic?
Contact usRecent Blog Posts

Advance Your Research
Contact NBT today for expert consultation on your neuroscience instrumentation needs.